
Hola bienvenidos de nueva cuenta a StudentPlace, el día de hoy estaremos tratando el tema de los actuadores, otro componente muy importante cuando de sistemas electrónicos programables estamos hablando.
Antes que nada comencemos con un par de definiciones y después veamos algunos tipos de actuadores. En esta entrada nos concentraremos en los actuadores eléctricos.
Definición de Actuadores
En si un actuador es un dispositivo con la capacidad de generar una fuerza que ejerce un cambio de posición, velocidad o estado de algún tipo sobre un elemento mecánico, a partir de la transformación de energía. En resumen, es simplemente un dispositivo que "actua", realiza una acción determinada en base a una señal emitida. Por lo regular se clasifican en dos grandes grupos:
- Tipo de energía utilizada: Actuador neumático, hidráulico y eléctrico.
- Tipo de movimiento que generan: Actuador lineal y rotatorio.
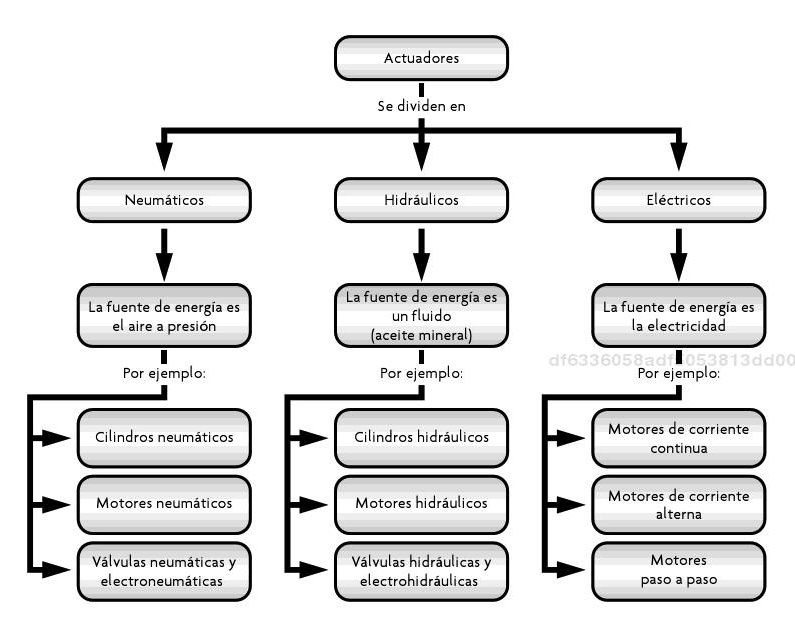 |
| Diagrama de los tipos de actuadores según la energía utilizada |
En fin, ya aclarando esto comencemos con lo que nos atañe en esta entrada, los actuadores eléctricos.
Actuadores Eléctricos
Transforman la energía eléctrica en energía mecánica, ya sea rotacional o lineal. De los actuadores disponibles en el mercado, estos son los que se usan con mayor frecuencia, ya que su fuente de alimentación es eléctrica. El ejemplo más común son los motores eléctricos, es así que hablaremos de los principales tipos de motores que entran dentro de esta clasificación.
Motor de Corriente Directa
Básicamente consta de un rotor y un estator. El rotor es la parte móvil que proporciona la fuerza que actúa sobre la carga mecánica, mientras que el estator es la parte fija que provee el magnetismo necesario para inducir la fuerza electromotriz.
Una de las características principales de este tipo de motor radica en que la velocidad de rotación es proporcional al voltaje, mientras que el torque es proporcional a la corriente que circula por su devanado.
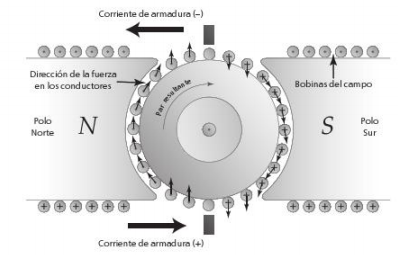 |
| Dirección de fuerzas en un motor de CD de imán permanente |
En un motor de corriente directa las espiras (cada una de las vueltas de un alambre que forma la bobina) están alojadas en la armadura y son recorridas por una corriente continua que genera una fuente de energía externa; estas espiras, a su vez, están sometidas a la acción del campo magnético homogéneo que generan los polos del motor. Esto genera una serie de fuerzas que hacen que la armadura gire.
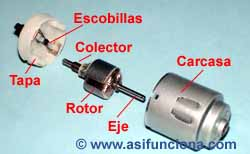 |
| Partes de un motor de corriente directa |
En la anterior imagen podemos observar el interior de un motor de corriente directa simple, en él se puede reconocer el rotor y el estator (el cual estaría conformado, en este caso por la carcasa y la serie de imanes colocados dentro de la misma), a su vez podemos observar otros elementos importantes en este tipo particular, como las escobillas, las cuales entregan la corriente continua al colector, el colector recibe la corriente y la transmite a las espiras enrolladas en la armadura (también llamado rotor) generando así los campos magnéticos.
Características
En resumen, podemos decir que este tipo de motores:
- Se conforman de básicamente de un rotor y un estator.
- Su velocidad es proporcional al voltaje aplicado.
- El torque es proporcional a la corriente que circula en su devanado.
- Requieren mantenimiento constante acorde a su utilización debido a el desgaste de piezas como colectores y escobillas debido a la constante fricción para generar el contacto eléctrico.
Comunicación:
Este tipo de motores no tiene tal cual una forma de comunicación inteligente con el resto de un sistema programable, más que nada debido a su construcción puramente analógica, sin embargo, en apoyo con otros componentes como una placa en Arduino, pueden en su debido momento comportarse inteligentemente. Veamos un ejemplo:
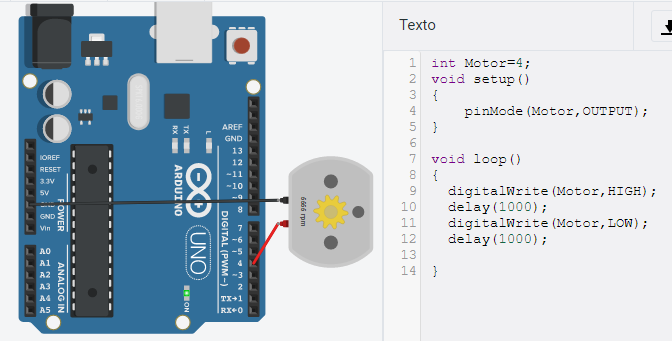 |
| Uso de motor CD con arduino |
En este caso podemos observar un motor de corriente directa conectado a la entrada digital núm. 4 de Arduino. De esta forma la comunicación es de una sola vía, enviando señales intermitentes al motor (simplemente mandando corriente eléctrica para cerrar el circuito y ponerlo en funcionamiento) para hacerlo girar en intervalos de un segundo.
Servomotores:
El servomotor es uno de los actuadores más usados en la integración de sistemas, en su interior dispone de un motor con un reductor de velocidad y multiplicador de fuerza. Y además cuenta con un circuito de control. En la mayoría de estos actuadores, el ángulo de giro del eje es de 180°, pero puede ser modificado con facilidad para tener un giro libre de 360°, como en el motor de corriente directa.
 |
| Componentes de un servomotor |
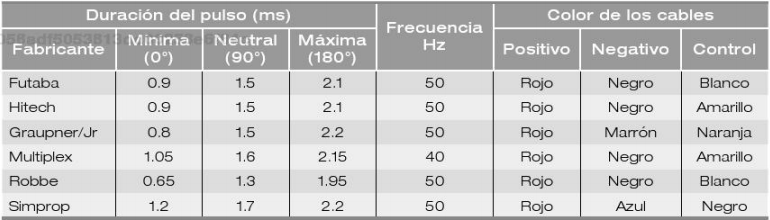
En tabla se muestran las características principales de algunas marcas de servomotores:
Funcionamiento del servomotor. Control PWM
La modulación por ancho de pulso. PWM (Pulse Width Modulation), es una de las técnicas más empleadas para el control de servomotores. Consiste en generar una onda cuadrada en la que se varía el tiempo que el pulso está a nivel alto, manteniendo el mismo periodo, con el objetivo de modificar la posición del eje según se desee.
Para la generación de una onda PWM en una tarjeta Arduino se dispone de hardware específico. En Ia imagen siguiente se observa Ia modulación para diferentes anchos de pulso que utiliza el servomotor.
 |
| PMW para recorrer todo el rango de operación del servomotor. |
El servomotor tiene márgenes de operación que se corresponden el ancho del pulso máximo y mínimo. Los valores más generales se corresponden con pulsos de I ms y 2 ms de anchura, que sitúan al motor en ambos extremos (0° y 180°). Es Importante hacer notar que valor de 1.5 ms indica la posición central o neutra (90°), mientras que otros valores del pulso lo sitúan en posiciones intermedias.
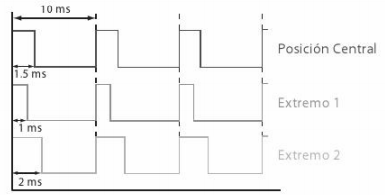 |
| Tren de pulsos para control de servomotor |
Estos valores suelen ser los recomendados; sin embargo, es posible emplear pulsos menores de 1 ms o mayores de 2 ms, con lo que es posible conseguir ángulos mayores de 180 grados. El factor limitante es el tope mecánico del potenciómetro y los límites mecánicos constructivos.
El periodo entre pulso y pulso (tiempo apagado) no es crítico, e incluso puede ser distinto entre uno y otro pulso; se suelen emplear valores -20 ms (entre 10 y 30 ms).
Es importante destacar que para que un servomotor se mantenga en la misma posición es necesario suministrar en forma continua el pulso correspondiente. De este modo, si existe alguna fuerza externa que lo obligue a abandonar esta posición, el esquema de control corregirá el error.
Comunicación:
Para controlar un servomotor debe aplicarse un pulso de duración y frecuencia específico. Por lo general, los servomotores disponen de tres cables. dos para alimentación Vcc y GND (4.8 a 6V) y un tercero para aplicar una secuencia de pulsos de control. Depende del ancho del pulso. El circuito interno de control diferencial Ileva al servomotor a la posición indicada.
En la imagen siguiente se muestra un simulador ejecutando una representación del uso de un servomotor, en este caso los cables rojo y negro representan las conexiones a tierra y voltaje correspondientemente, el cable amarillo representa el cable de comunicación, es decir aquel que recibe los pulsos correspondientes de la placa de Arduino. En este caso el servomotor moverá su eje desde los 0° hasta los 180° y viceversa respectivamente en intervalos de 5 segundos.
 |
| Simulación de uso de un servomotor con arduino. |
Motor de Corriente Alterna.
Los motores de corriente alterna tienen una estructura y funcionamiento similar a los motores de corriente directa, sin embargo una de las principales diferencias es el uso de la corriente alterna como su fuente de energía.
Su principal uso es en la industria y dado que la mayoría de las máquinas utilizadas en están movidas por motores asíncronos alimentados por corriente alterna trifásica, tocaremos rápidamente su acerca de estos tipos de motores.
Como toda máquina eléctrica, los motores asíncronos constan de dos partes fundamentales y distintas:
- El estator.- Es la parte fija del motor. Está constituido por una carcasa en la que está fijada una corona de chapas de acero al silicio provistas de unas ranuras. Los bobinados de sección apropiada están dispuestos en dichas ranuras formando las bobinas que se dispondrán en tantos circuitos como fases tenga la red a la que se conectará la máquina.
- El rotor.- Es la parte móvil del motor. Está situado en el interior del estator y consiste en un núcleo de chapas de acero al silicio apiladas que forman un cilindro, en el interior del cual se dispone un bobinado eléctrico. Los tipos más utilizados son:
- Rotor de jaula de ardilla.
- Rotor bobinado.
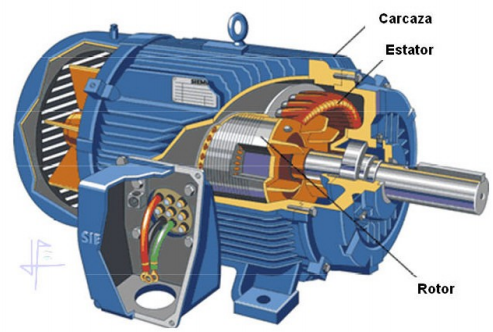 |
| Motor de Corriente Alterna |
Motores de rotor con jaula de ardilla:
El motor de rotor de jaula de ardilla, también llamado de rotor en cortocircuito, es el más sencillo y el más utilizado actualmente. En núcleo del rotor está construido de chapas estampadas de acero al silicio en el interior de las cuales se disponen unas barras, generalmente de aluminio moldeado a presión.
Las barras del devanado van conectadas a unos anillos conductores denominados anillos extremos. El bobinado así dispuesto tiene forma de jaula de ardilla.
 |
| Estructura de un rotor de jaula de ardilla |
Las ranuras del rotor y suelen hacerse oblicuas respecto al eje para evitar así puntos muertos en la inducción electromagnética. Un inconveniente de los motores con rotor de jaula de ardilla es que en el arranque absorbe una corriente muy intensa (de 4 a 7 veces la nominal o asignada), y lo hace además con un bajo factor de potencia, y a pesar de ello, el par de arranque suele ser bajo.
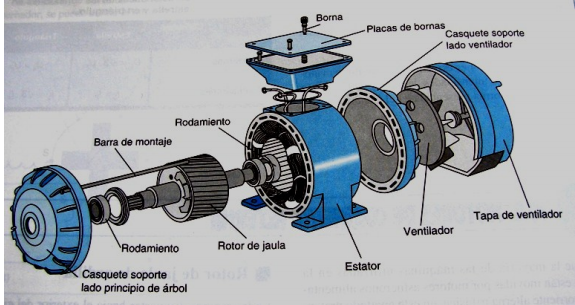 |
| Modelo de estructura de un Motor de CA con Rotor de Ardilla |
La baja resistencia del rotor hace que los motores de jaula de ardilla tengan excelentes características para marchas a velocidad constante. Hasta hace unos cuantos años (década de los 90), un inconveniente de los motores con rotor de jaula de ardilla era que su velocidad no era regulable, pero actualmente con los variadores de velocidad electrónicos se puede conseguir un control perfecto de la práctica totalidad de parámetros del motor, entre los que destacan el par, la corriente absorbida y la velocidad de giro.
Motores de Rotor de Anillos Rozantes:
 |
| Rotor de Anillos Rozantes |
Son motores asíncronos con un devanado trifásico de cobre dispuesto en las ranuras de rotor, que va conectado a tres anillos metálicos por uno de sus extremos, en tanto que, por el otro lado se conectan en estrella. De este modo se puede controlar desde el exterior la resistencia total del circuito rotórico, facilitando un control de la velocidad y corriente de arranque con un elevado par de arranque y un mejor factor de potencia que con el rotor en jaula de ardilla.
 |
| Estructura de un Motor de CA con Rotor de Anillos Rozantes |
Características:
Los parámetros de operación de motores eléctricos permiten conocer sus características nominales provenientes del fabricante, para realizar implementaciones de acuerdo a las características nominales que se necesiten. Es por esto que, se toman en cuenta los siguientes parámetros:
- Potencia.
- Voltaje.
- Corriente.
- Revoluciones por minuto.
Potencia.
Se define como la rapidez que permite el accionamiento de los motores. Matemáticamente, su concepto es la cantidad de trabajo realizado durante una unidad del tiempo. (potencia=trabajo/tiempo). Según el Sistema internacional, la variable de la potencia es joule por segundo, denominado en el ambiente de la electricidad como watt (W). No obstante, debido al manejo de unidades de gran tamaño, el watt no alcanza en los propósitos de la industria. Es por esto que, en el ámbito industrial, la potencia se la define en kilowatt (kW) o caballos de fuerza (HP).
Dado que las medidas de la potencia se miden en caballos de fuerza o kilowatt, la siguiente conversión ayudará al correcto manejo de estas variables.
- 1 Kw = 1000 W
- 1 HP = 747 W = 0.747 Kw
- 1 Kw = 1.34 H
Voltaje.
El voltaje, llamado además como tensión eléctrica o diferencia de potencial, en muchos textos de electricidad, que se ubica entre dos puntos del circuito. También se denomina como el trabajo necesario de traslado de la carga positiva de un punto hacia otro.
Es una medida muy importante en la operación de cualquier carga, debido a que, por el correcto manejo de esta variable, se podrá obtener una excelente utilización de la operación.
Corriente.
Es el flujo de carga eléctrica, por unidad de tiempo, a través de una superficie conductora. El sentido de la corriente eléctrica corresponde con el del campo eléctrico, que se encarga de las cargas positivas a través de portadores. Si las cargas en estos portadores son negativas (electrones), la corriente tiene el sentido contrario al movimiento de las cargas eléctricas.
La unidad de la corriente eléctrica es el ampere o amperio. Se simboliza por un flujo de carga con la rapidez de un coulomb por segundo, que atraviesa cualquier punto.
En la industria, la corriente de la maquinaria utilizada necesita varios tipos de corriente, como:
- Corriente nominal: Corriente que consume el dispositivo en condiciones normales de operación.
- Corriente de vacío: Es el 20% o 30% de la corriente nominal que consume el dispositivo, cuando no está operando con carga.
- Corriente de arranque: En los motores eléctrico, para que permita su operación se necesita un excedente de la corriente, mayor aún a su corriente nominal, denominada corriente de arranque.
- Corriente a rotor bloqueado: Es la corriente máxima que soporta el motor cuando su rotor está detenido.
Revoluciones por minuto.
Es la cantidad de vueltas completas que realiza el rotor en el intervalo de tiempo de un minuto. También denominado velocidad angular, junto con su símbolo que es Omega [W]. Sin embargo, la velocidad angular o revolución por minuto dentro el campo industrial, se puede expresar con la letra N o con las siglas R.P.M.
Motores Paso a Paso
Los motores paso a paso trabajan con el mismo principio físico que los motores eléctricos rotatorios de corriente continua y alterna. Sin embargo, en el caso de estos tipos de motores, la conmutación se logra a través de algún sistema electrónico o tarjeta microcontroladora. Es decir, son aquellos que utilizan una secuencia de pulsos de corriente modulados que alimentan los devanados internos del motor, pulsos que son transformados en desplazamientos angulares discretos en forma directa por los polos del motor.
De esta manera el eje motriz es capaz de avanzar un determinado valor en grados, que puede ir desde 1.8° a 90°, según la secuencia que se indique. Los motores paso a paso los podemos clasificar en tres tipos:
- De imanes permanentes.
- De reluctancia variable.
- Híbridos.
En este documento hablaremos especialmente de los dos primeros dado que el último es una combinación de los primeros dos.
Motor paso a paso de reluctancia variable
La característica principal de este motor es la reducción y el aumento de la resistencia a la circulación del flujo magnético que se genera a lo largo del recorrido del campo magnético aplicado.
Características:
- La trayectoria del flujo magnético, que es generado por la corriente que circula en el inductor cruza el entrehierro y sufre una resistencia por el efecto del cambio de permeabilidad magnética.
- Generalmente el estator y el rotor están construidos con un conjunto de láminas de acero.
- El estator se conforma por 6 dientes donde yacen las bobinas que forman los polos, las cuales se excitan en tiempos diferentes.
- De acuerdo al punto anterior, esta estructura genera una bobina de varias fases.
- El rotor se conforma de 4 polos magnéticos.
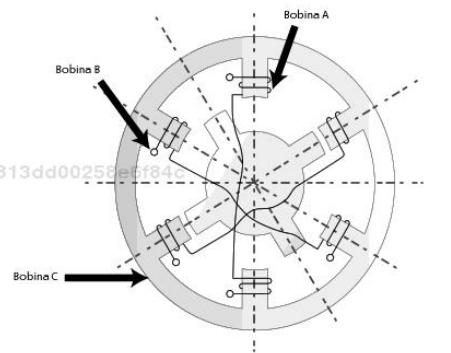 |
| Estructura interna de un motor paso a paso de 3 fases |
De esta manera para poder hacer girar el motor se es necesario aplicar voltajes de fase en un orden determinado. Si analizamos la siguiente tabla veremos las combinaciones de voltajes en fase necesarias para hacer girar un motor paso a paso 360° en el sentido de las manecillas del reloj.

Como vemos para hacer el giro completo de 360° es necesario aplicar 5 ciclos de voltaje al motor.
Motor a pasos de imán permanente
Como su nombre lo dice, este tipo de motores cuentan con imanes permanentes. En general este tipo de motores se fabrica con una disposición de 6 y 4 polos para el estator, y de seis, cuatro y dos polos para el rotor.
 |
| Estructura interna de Motores paso a paso de imán permanente |
Generalmente al iniciar sin corriente, en las bobinas, los polos se encuentran alineados con los dientes del estator, esto debido a su magnetización radial. Es entonces cuando al excitar alguna de las fases el campo magnético rompe tal equilibrio e inicia la rotación del motor buscando siempre la posición de equilibrio.
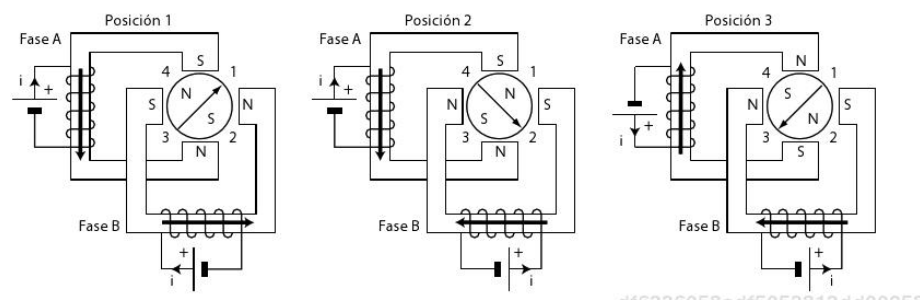 |
| Esquema de funcionamiento al paso de la corriente. |
Ejemplos de Motores Paso a Paso:
En este caso, para poder dar una explicación sobre los modos de comunicación, estaremos tratando con el motor paso a paso unipolar 28BYJ-48. Este es un motor de 4 fases conformadas por 8 bobinas dispuestas a 180° entre sí.
 |
| Motor paso a paso unipolar 28BYJ-48 |
| Características del motor paso a paso 28BYJ-48 |
Como podemos observar en la imagen 1.17, el motor a tratar cuenta con 5 conexiones, 4 de ellas para manejar las fases del motor y una salida a GND. Sin embargo este tipo de motor no puede ser conectado directamente a una placa arduino debido a su alto consumo, es por ello que para regularlo se utiliza un controlador, en este caso el driver ULN2003.
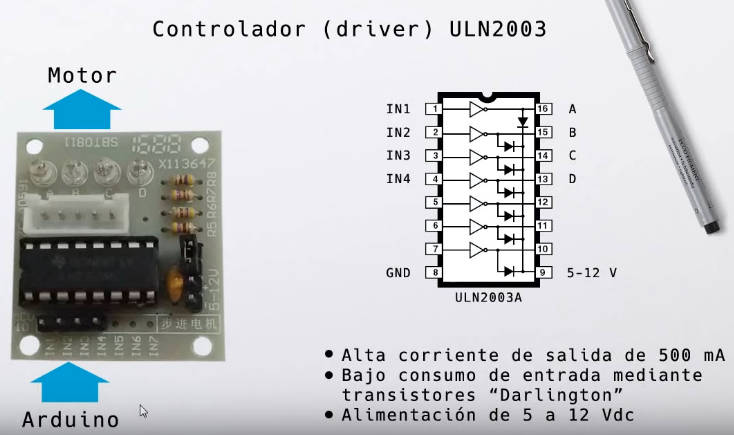 |
| Controlador ULN2003 |
Este tipo de controlador permite mandar pulsos lógicos directo al motor con un bajo nivel de corriente. Como podemos observar cuenta con sus pones de conexión desde IN1 a IN4 para conectar con Arduino y una conexión hembra para conectar los cables de conexión con el motor paso a paso.
En fin, creo que este artículo ya ha quedado lo suficientemente largo, es así que por hoy es todo, sigue pendiente a este blog que poco a poco vamos trayendo nuevo contenido y haciendolo crecer, comparte la información en redes sociales y siguenos en twitter por favor. Gracias.
Referencias:
Bibliográficas:
Libro: Sensores y Actuadores: Aplicaciones con Arduino
Autor: Leonel G. Corona Ramírez, Griselda S. Abarca Jiménez, Jesús Mares Carreño
Editorial: Grupo Editorial Patria
Año: 2014
Edición: Primera
ISBN: 978-607-438-936-4
Libro: Motores de corriente alterna.
Autor: I.E.S Valdelvira
Editorial: J. Garriegos
Año: 2011
Edición: Desconocido
ISBN: Desconocido
Formato: Tesis
Autores: Becerra Arreaga, Freddy Andrés
Trabajo de Titulación previo a la obtención del título de: INGENIERO ELECTRONICO EN CONTROL & AUTOMATISMO
Lugar: Guayaquil, Ecuador
Fecha: 13 de septiembre del 2017
Visuales:
Formato: Video
Nombre: Arduino desde cero en Español - Capítulo 30 - Paso a Paso unipolar 28BYJ-48 con ULN2003
Duración: 31:52 min
Fecha: 26 de Nov. 2017
Earn Paypal Extra Cash For Free By Sharing Your Link
ResponderEliminarhttps://paypalfree.com